实验描述
学生交互性操作步骤,共13步
|
步骤序号 |
步骤目标要求 |
步骤合理用时 |
目标达成度赋分模型 |
步骤满分 |
成绩类型 |
|
1 |
掌握工业机器人工作原理、坐标系 |
10 |
准确和熟练操作工业机器人的6个关节运动,准确分析和选择工业机器人关节坐标系得4分;未达到要求适当进行加分 |
4 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
2 |
掌握工业机器人工作内部结构 |
10 |
准确和熟练完成J1-2轴、J3-4轴、J5-6轴的拆卸与组装,准确区分工业机器人工作内部结构得4分;未达到要求适当进行加分 |
4 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
3 |
掌握工业机器人虚拟示教器工作原理 |
5 |
准确和掌握示教器30个按键的操作练习,准确分析和选择示教器按键得3分;未达到要求适当进行加分 |
3 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
4 |
掌握工业机器人手爪机理 |
3 |
准确和掌握工业机器人手爪类型,准确选择本实验项目手爪类型,并成功安装到工业机器手臂前端得3分;未能准确选择本实验项目手爪类型,并成功安装到工业机器手臂前端得0分;其他情况要求适当进行加分 |
3 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
5 |
掌握工业机器人虚拟示教原理 |
20 |
实现要求的功能,工作轨迹距离不大于参考值的1.1倍,未出现错误警告[9分]。 基本实现要求的功能,工作轨迹规划距离在参考值的1.1-1.3倍之间,含1.3倍,出现错误警告2次以内[8分]。 基本实现要求的功能,工作轨迹规划距离在参考值的1.3-1.5倍之间,含1.5倍,出现错误警告3-4次[6分]。 不能全部实现要求的功能,工作轨迹规划距离大于参考值的1.5倍,出现错误警5次及以上[4分] |
9 |
√操作成绩 √实验报告 √预习成绩 ☐教师评价报告 |
|
6 |
掌握自动化生产线各工序工业机器人作业要求 |
3 |
工业机器人工作轨迹确认正确[2分]。 工业机器人工作轨迹确认正确[1分] |
2 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
7 |
掌握自动化生产线协同参数设置内容 |
20 |
协同控制操作参数设置熟练 [9分]; 协同控制操作参数设置较熟练, [8分]; 协同控制操作参数设置基本熟练 [6分]; 协同控制操作参数设置不熟练 [5分] |
9 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
8 |
掌握自动化生产线人机协同控制机理 |
30 |
协同控制生产线生产节拍设置规范合理(在2次内完成协同控制调整) [14分]。 协同控制生产线生产节拍设置较规范合理(在2-4次内完成协同控制调整,含4次) [12分]。 协同控制生产线生产节拍设置基本规范合理(在4-6次内完成协同控制调整,含6次);入库操作基本熟练[9分]。 协同控制生产线生产节拍设置存在不规范不合理(在6次以上才完成协同控制调整) [7分] |
14 |
√操作成绩 √实验报告 √预习成绩 ☐教师评价报告 |
|
9 |
掌握自动化生产线不同零部件生产过程规程规划 |
3 |
准确分析展示数据得2分;未达到要求适当进行减分 |
2 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
10 |
掌握自动化生产线中产品装配操作 |
4 |
装配操作熟练[3分]。 装配操作较熟练[2分]。 装配操作不熟练[1分] |
3 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
11 |
掌握自动化生产线中产品虚拟运动仿真操作 |
4 |
运动仿真操操作熟练[3分]。 运动仿真操操作较熟练[2分]。 运动仿真操操作不熟练[1分] |
3 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
12 |
掌握自动化生产线中产品入库规划和码垛操作 |
5 |
入库和码垛操作熟练[4分]。 入库和码垛操作较熟练[3分]。 入库和码垛操作不熟练[2分] |
4 |
√操作成绩 √实验报告 ☐预习成绩 ☐教师评价报告 |
|
13 |
完成实验考核测试 |
10 |
回答错误共少于1道题[10分]; 回答错误共2-3道题[8分]; 回答错错误共4道题[6分]; 回答错5道题及以上[4分] |
10 |
√操作成绩 √实验报告 √预习成绩 √教师评价报告 |
2.交互性步骤详细说明
该实验教学项目属于《工业机器人》课程,同时适应于《自动化制造系统》、《专业综合实验》和《智能制造技术》”等课程,共计3个实验学时。具体学生交互性操作主要步骤及其流程图如图16所示。如图16(a)所示,学生在整个场景和情境中进行交互性操作包括实验题测试共13步;如图16(b)所示,实验流程为:登录系统--机器人原理认知--设备认知 --示教器认知 --示教前准备 --虚拟示教操作--协同实验中工业机器人工作路径设计 --协同实验参数设置 --显示和记录数据 --协同控制效果评判--开始生产--齿轮泵虚拟装配-- 齿轮泵运动仿真-- 齿轮泵入库设计 --考核环节-- 生成实验报告 --实验结束。
.png)
.png)
图16 实验操作步骤及其流程图
如图17所示,已于2021年完成在Ilab实验空间登录链接。

图17 Ilab实验空间登录链接
步骤1:工业机器人各轴运动的交互操作
本步骤的实验目的是掌握工业机器人工作原理、坐标系。“学习模式/机器人原理/型号规格”中显示工业机器人型号规格编制由公司代码、机器人加载、特性代码、本体型号和控制柜型号组成,如图18(a)所示,举例“ER3A—C60”型号规格涵义,如图18(b)所示,点击演示和熟悉机械系统中6个伺服电机驱动6个关节的运动实现不同运动形式交互操作。
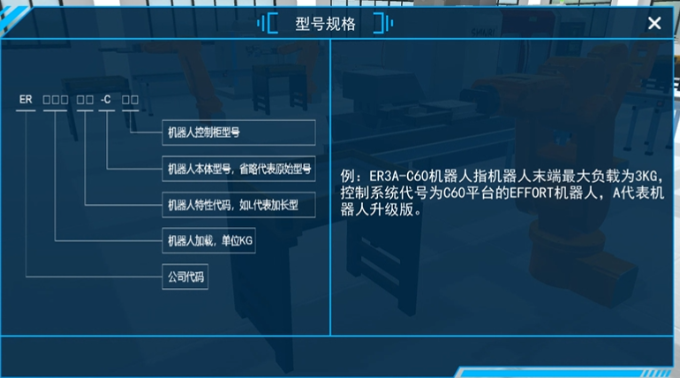
(a)
(b)
图18 工业机器人机械系统各轴运动形式的交互操作
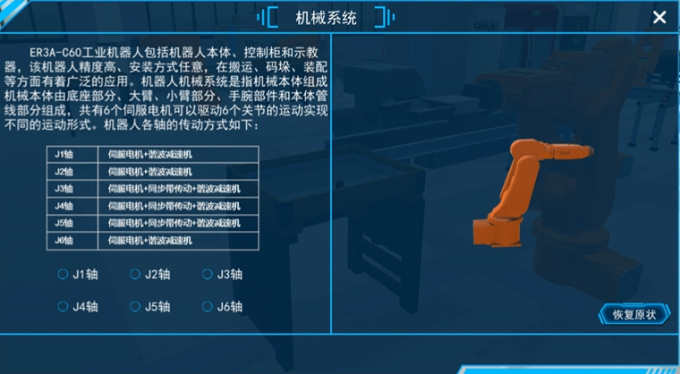
工业机器人的6个关节(J1、J2、J3、J4、J5、J6各轴)的运动过程的交互操作选择,掌握各个关节运动特点,“学习模式/机器人原理/机械系统”操作中显示各关节运动过程,如表2所示。
表2 工业机器人的6个关节J1、J2、J3、J4、J5、J6各轴的运动原理
|
关节 |
交互操作选择 |
运动过程 |
|
J1轴 |
|
|
|
J2轴 |
|
|
|
J3轴 |
|
|
|
J4轴 |
|
|
|
J5轴 |
|
|
|
J6轴 |
|
|






工业机器人的关节坐标系、运动学标系、工具坐标系、世界坐标系、工件坐标系等各种坐标系选择,如图19所示,为关节坐标系。

图19 工业机器人各种坐标系的选择
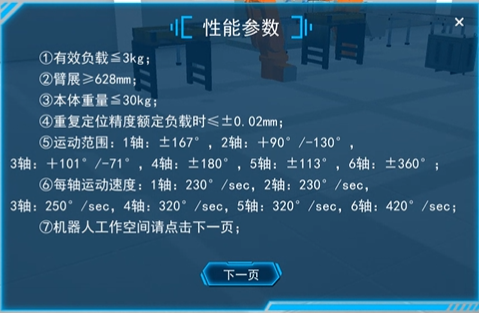
工业机器人性能参数认知,“学习模式/机器人原理/性能参数”操作中显示运动范围等性能参数,如图20所示。
 -
-
图20 工业机器人性能参数截图
步骤2,工业机器人虚拟拆装
本步骤的实验目的是掌握工业机器人工作内部结构。人机协同自动化生产线的概况认知,“学习模式/设备认知/概括”操作中显示工业机器人布置等要求,如图21所示。
.png)
图21 人机协同自动化生产线的概况
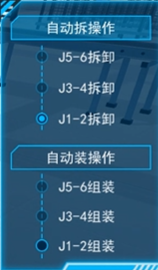
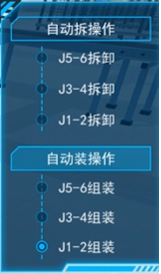
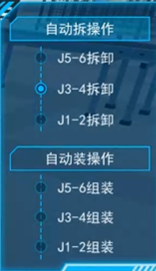
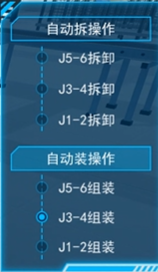
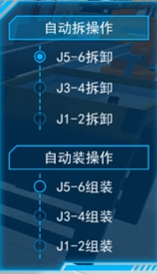
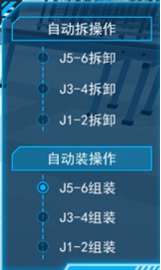
沉浸式漫游工业机器人本体结构虚拟拆装,如表3所示,分为J1-2轴、J3-4轴、J5-6轴等共3组,分别进行虚拟拆卸与组装实验操作,可以选择界面“放大”,增加沉浸浏览效果。
表3 工业机器人的6个关节J1、J2、J3、J4、J5、J6轴的拆卸与组装
|
实验操作 |
交互操作结果截图 |
|
J1-2轴的虚拟拆卸与组装
|
|
|
J3-4轴的虚拟拆卸与组装
|
|
|
J5-6轴的虚拟拆卸与组装
|
|



步骤3:示教器按键操作练习
本步骤的实验目的是掌握工业机器人虚拟示教器工作原理。“学习模式/示教器认知”操作中显示示教器每一个按键功用,示教器的启动、暂停、模式旋钮、急停和功能按键的30个按键的操作练习与学习,如图22所示。
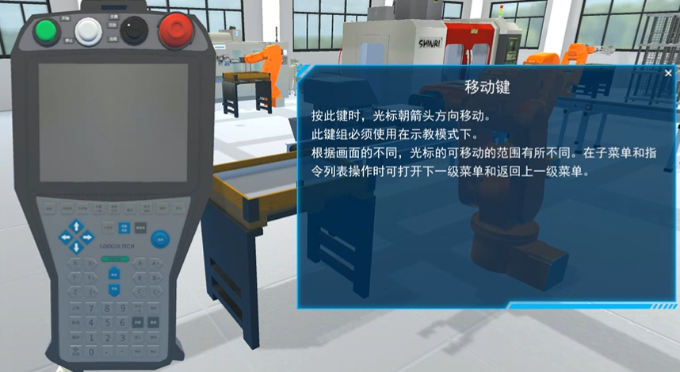
图22 示教器按键的操作练习
步骤4:机器人手爪选取
本步骤的实验目的是掌握工业机器人手爪机理。根据工业机器人夹持对象针对性选择和安装机械爪、气动吸盘、电磁吸盘等,“实操模式/示教实验”操作中选取实验所需安装“手爪类型”,即本实验选取“机械爪”,如图23所示。
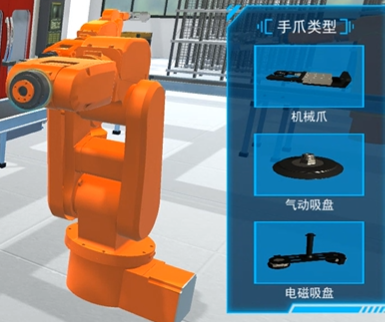
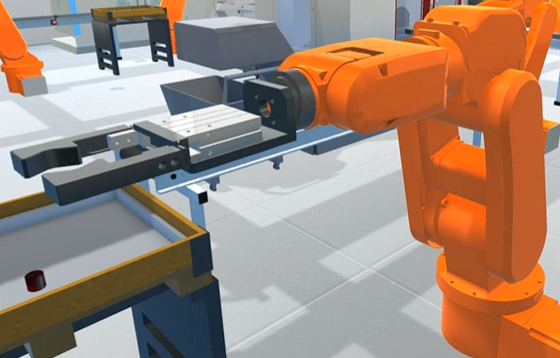
(a)机器人手爪选取前 (b)机器人手爪选取安装后
图23 机器人手爪选取与安装
步骤5:工业机器人工作轨迹规划示教
本步骤的实验目的是掌握工业机器人虚拟示教原理。“实操模式/示教实验”操作示教器,完成工业机器人对齿轮毛坯零件的抓取、放置、避障作业的轨迹规划设置;设置机器人运动速度,确定坐标系;本实验选择“关节”坐标系,对着参考点,按要求对所有记录点逐点示教逐点记录,且系统设置手爪靠近工件时,自动抓取工件;手爪靠近输送带时,自动放置工件,获得工业机器人工作轨迹规划,运行一次,结束工业机器人工作轨迹规划示教实验,如图24所示。
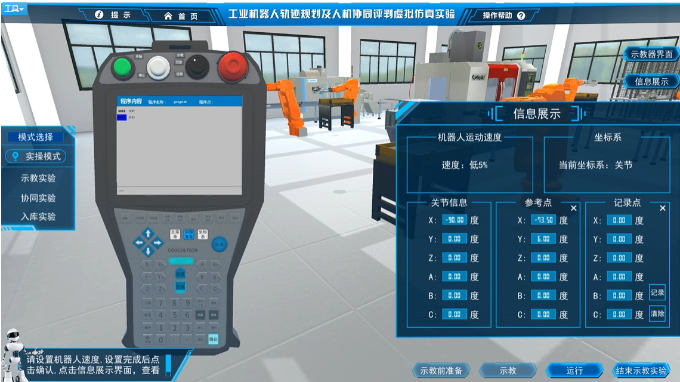
图24 工业机器人示教操作
示教操作过程中,要求实现避障,当出现机械手臂撞到物品时,出现纠错提示,如图25所示,工业机器人自动回到上一示教点,再次示教操作,重新调整6个关节示教参数。
图25 工业机器人示教操作出现碰撞纠错提示截图
步骤6:工业机器人工作轨迹确认
本步骤的实验目的是掌握自动化生产线各工序工业机器人作业轨迹要求。根据协同实验中自动化生产线中加工机床机械加工要求,“实操模式/协同实验”操作需先确定工业机器人工作轨迹,通过“模式选择”完成,如图26(a)所示;工业机器人工作路径设计有两种模式,即“默认模式”和“示教模式”,如图26(b)所示;在选择“默认模式”时,调用平台系统所设计的标准工作路径完成作业任务,如图26(c)所示;在选择“示教模式”时,调用“示教实验”中所示教的工业机器人工作路径,如果前面示教实验未完成,警告提示请返回并完成示教实验再进行协同实验,或者请选择默认模式,如图26(d)所示;如果前面示教实验已完成,则直接进行加载,如图26(e)所示。

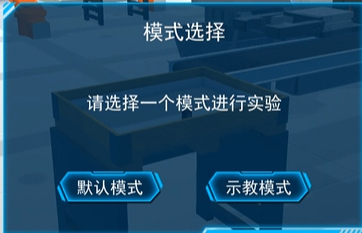
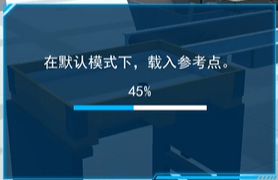
(a)模式选择 (b)两种模式 (c)默认模式载入进程
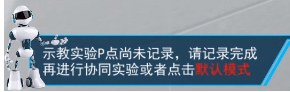
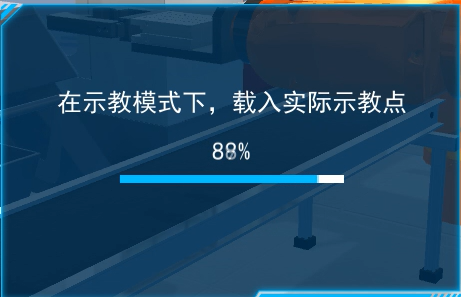
(d)示教模式载入失败警告 (e)示教模式成功载入进程
图26协同实验工业机器人工作轨迹确认
步骤7:协同参数设置
本步骤的实验目的是掌握自动化生产线协同参数设置机理。如图27所示,“实操模式/协同实验”操作需接着完成协同实验的设置参数。

图27 工业机器人示教操作出现碰撞纠错提示截图
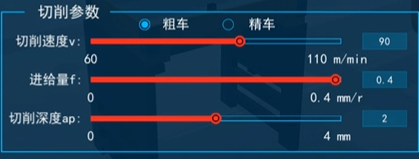
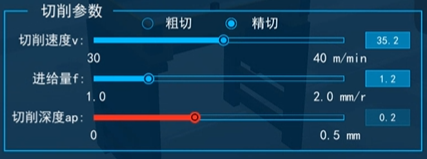
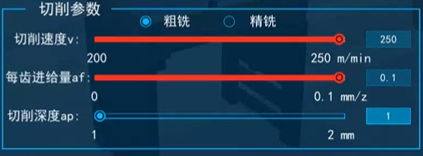
设置自动化生产线工艺路线中车削加工(粗车和精车)、滚齿加工(粗切和精切)和铣削加工(粗铣和精铣)的切削速度、进给量和切削深度的切削三要素,设置传送带参数,具体参数设置结果如表4所示。参数设置后进行“数据展示”。
表4 自动化生产线的协同参数设置列表
|
参数设置对象 |
参数设置结果 |
|
|
车削加工 |
粗车 |
精车 |
|
|
|
|
|
滚齿加工 |
粗切 |
精切 |
|
|
|
|
|
铣削加工 |
粗铣 |
精铣 |
|
|
|
|
|
传送带 |
|
|




步骤8:协同控制效果评判
本步骤的实验目的是掌握自动化生产线人机协同控制机理。如图28所示,参数设置完成后,“实操模式/协同实验”操作需随后完成协同控制效果评判,其根据“自动化生产线生产节拍协同控制原理”进行,评判参数设置是否符合自动化生产线生产节拍协同控制原理。

图28 协同效果评判
协同控制效果评判结果有两种,如图29(a)所示,协同控制效果符合要求;如图29(b)所示,纠错警告和引导提示协同控制效果不符合要求,请重新修改参数,返回上一步骤,协同参数重新设置,再进行协同控制效果评判,直至协同控制效果符合要求。“自动化生产线生产节拍协同控制原理”主要要求是当泵体未加工完,齿轮就不能运动到放置泵体的位置;当泵体未被机器人从主输送带抓往装配操作台,齿轮就不要放置到输送带上。
(a)协同控制效果评判结果符合要求 (b)协同控制效果评判结纠错警告
图29 协同控制效果评判
步骤9:自动化生产线生产运行
本步骤的实验目的是掌握自动化生产线不同零部件生产过程规程规划实效。完成协同控制实验中的参数设置和工业机器人作业路径设计,“实操模式/协同实验”需随后完成规划成效运行仿真,数据展示如图30所示,记录工业机器人示教工作路径长度、加工工时等加工过程数据,在实验报告中进行数据记录。
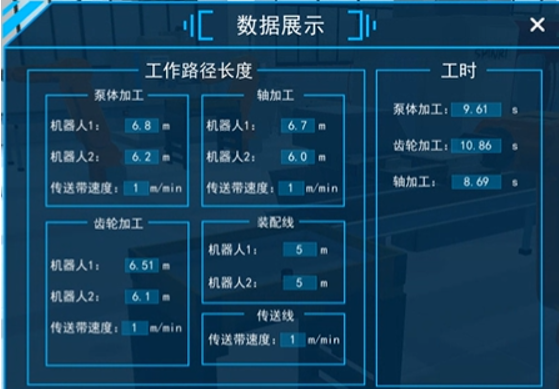
图30 协同控制参数设置后数据展示
自动化生产线按照协同控制效果评判符合要求的结果开始生产,如图31所示,协同实验结束。
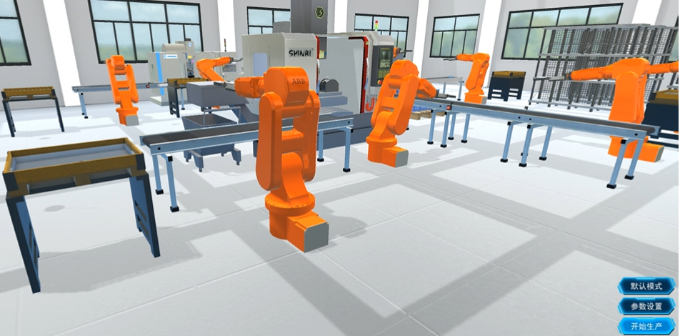
图31 协同控制参数设置后生产仿真
步骤10:齿轮泵虚拟装配
本步骤的实验目的是掌握自动化生产线中产品装配操作过程。根据自动化生产线协同控制结果,泵体、齿轮从输送带依次输送至装配工作台,工业机器人依次抓取泵体、齿轮,“实操模式/入库实验/虚拟装配”操作根据指示路径漫游至操作台位置,如图32所示,通过“播放虚拟装配动画”沉浸式漫游齿轮泵虚拟装配过程。
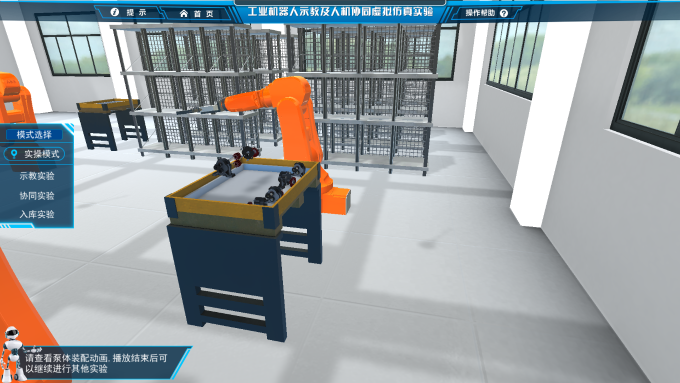
图32 齿轮泵虚拟装配
步骤11:齿轮泵运转仿真
本步骤的实验目的是掌握自动化生产线中齿轮泵产品运转机理。齿轮泵装配完成后,在操作台位置,“实操模式/入库实验/泵产品运动动画”操作运动仿真齿轮泵运转,如图33所示,通过选择操作台上待选齿轮泵,沉浸式漫游齿轮泵中各齿轮相互啮合传动。

图33 齿轮泵运转仿真
步骤12:齿轮泵入库设计
本步骤的实验目的是掌握自动化生产线中泵产品入库和码垛规划设计。在生产线仓储位置,“实操模式/入库实验/入库操作”操作泵产品入库和码垛 ,齿轮泵产品码放到仓库货架上指定位置,如图34(a)所示,仓库货架显示可放置位置;选择可放置位置,如图34(b)所示,工业机器人准确地将齿轮泵产品码放到货架上所选择的位置,入库实验结束,然后如图35所示,点击“已完成入库实验”对话框的“确定”。

(a)选择货架放置齿轮泵的位置 (b)齿轮泵放置到货架上指定位置
图34 齿轮泵入库截图

图35 “已完成入库实验”的“确定”
步骤13:实验题测试
本步骤的实验目的是掌握实验原理、目的、内容及思考等考核测试。“考核操模式”操作实验后考核测试,如图36(a)所示,系统自动从“学习认知考核”题库中抽取3题供解答,答题确定提交后,如图36(b)所示,系统自动进行评判,如果遗漏未完成测试题,系统提示“还有题目未完成”。
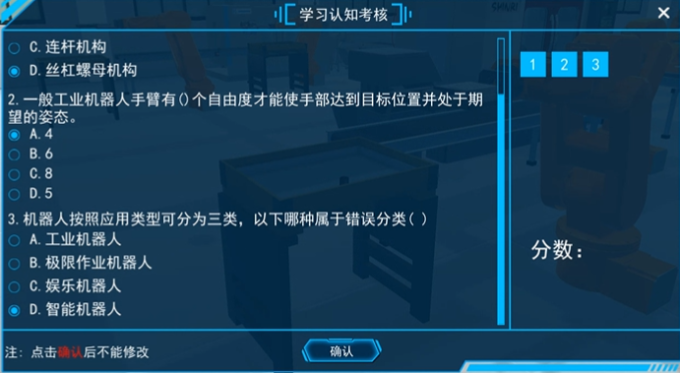
(a) 学习认知考核环节解答
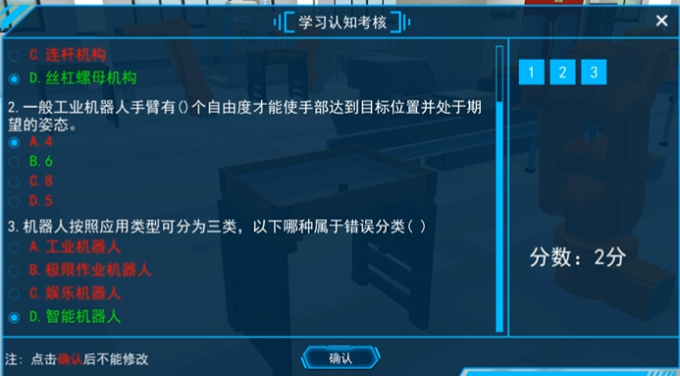
(b) 学习认知考核环节评判
图36 学习认知考核环节
示教实验考核环节中,如图37(a)所示,系统自动从“示教实验考核”题库中抽取3题供解答,答题确定提交后,如图37(b)所示,系统自动进行评判。
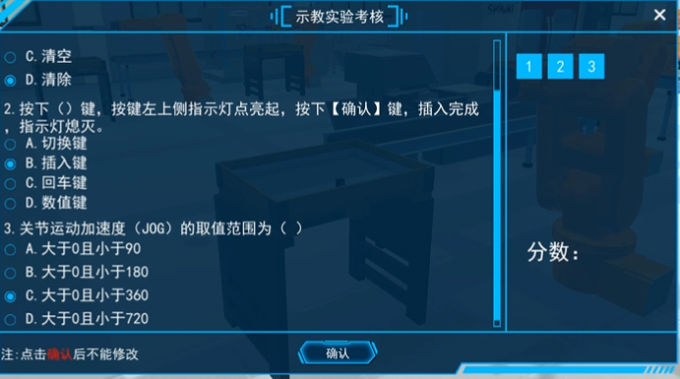
(a) 示教实验考核环节解答
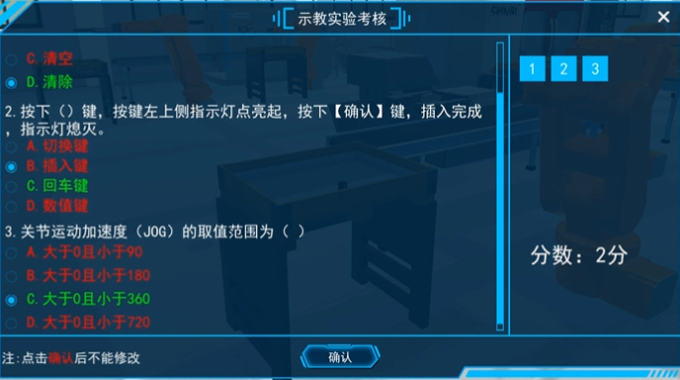
(b)示教实验考核环节评判
图37 示教实验考核环节
协同实验考核环节中,如图38(a)所示,系统自动从“协同实验考核”题库中抽取4题供解答,答题确定提交后,如图38(b)所示,系统自动进行评判。
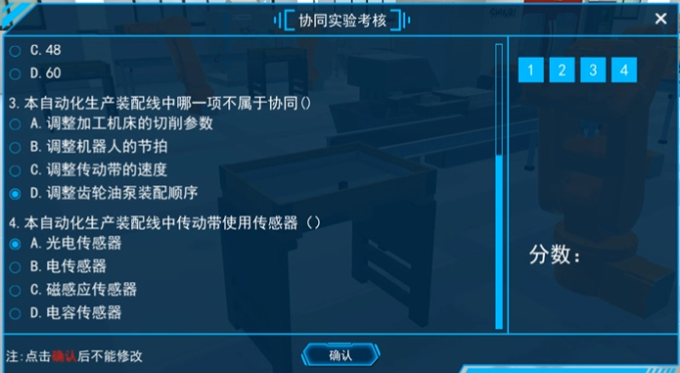
(a) 协同实验考核环节解答
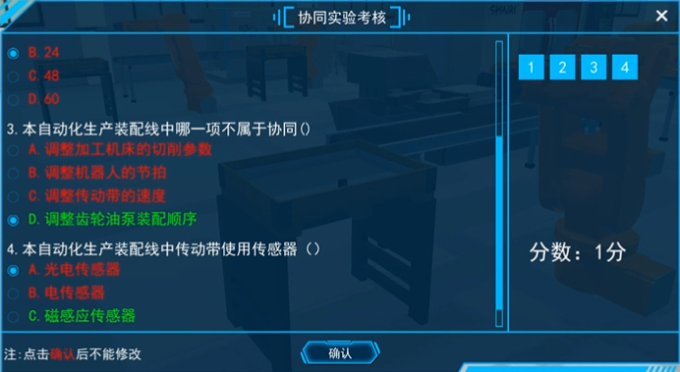
(b)协同实验考核环节评判
图38 协同实验考核环节
为了防止在上述“学习认知考核”“示教实验考核”“协同实验考核”考核中漏答题目,对系统进行完善,增加提示功能。当有考核题目未全部回答时,如点击“确认”按钮,如图39所示,系统左下角自动提醒“还有题目未完成”,确保不存漏答题目。
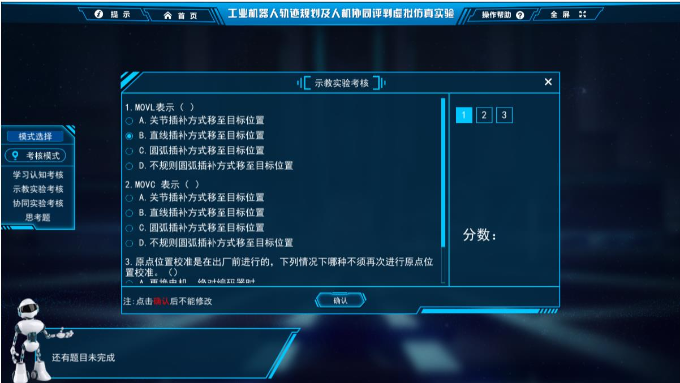
图39 漏答题目时提醒
思考题考核环节中,如图40所示,实验思考题共5题,依次作答,再确定和上传,生成在实验报告中,属于主观题,由指导老师进行评判。
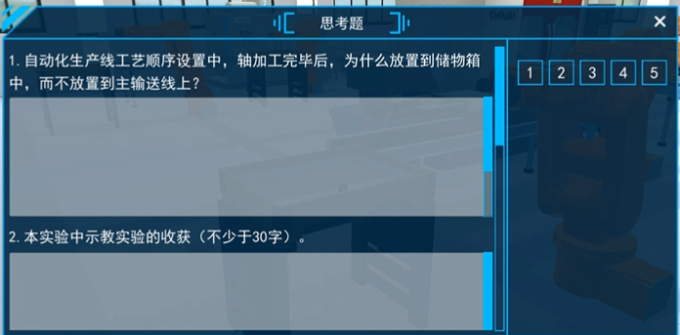
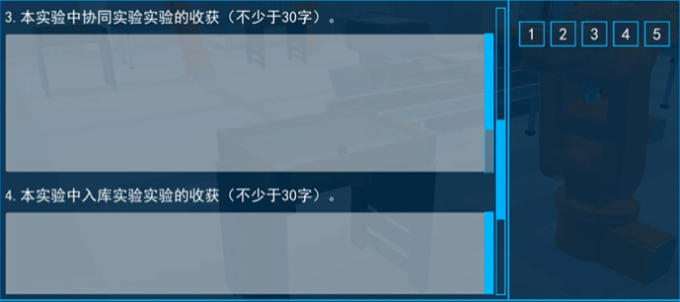
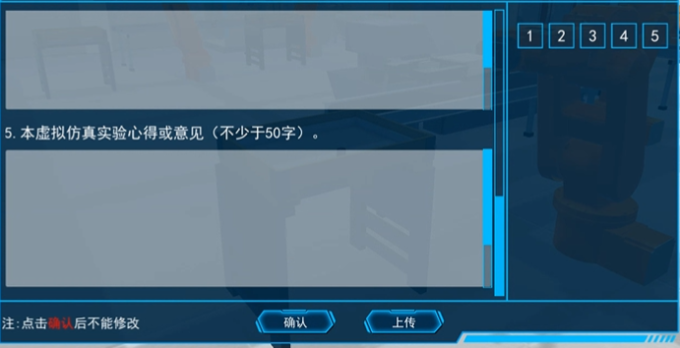
图40 思考题考核环节