实验描述
一、实验教学过程
实验教学过程包括各环节教学方法和实验教学过程教学内容及学时分配,具体如下。
(1)各环节教学方法
本虚拟仿真实验将信息技术与实验教学的深度融合,包括“课内课外、校内校外”,极大地拓展了学生的学习资源和空间,特别适应现代的发展,以及丰富了学生学习形式。在教学设计中充分体现“学生中心、产出导向、持续改进”的实验教学理念。如图9所示,采用“教师主导+学生主体”的“331”OBE理念教学模式,即:教师采用启发式创新、互动式讨论、任务式驱动的“三策略”引导,学生进行沉浸式认知、交互式练习、自主式设计的“三阶段”体验,对学生实验前、实验中、实验后全过程的“一过程”评价,全面培养学生解决和分析复杂工程问题的能力,提高学生的综合素质,达成课程目标和毕业要求,构成闭环管理。

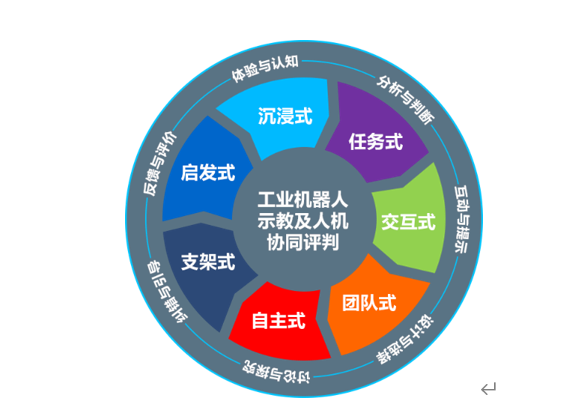
图9 “331”OBE理念教学模式
本虚拟仿真实验分为“五个环节和三个模式”即“工业机器人虚拟拆装”环节、“工业机器人轨迹规划”环节、“生产线人机协同控制”环节、“产品装配及入库”环节、“实验考核”环节和“学习模式”“实操模式”“考核模式”。每个环节教学方法与学习方法分配如图10所示,包括学生沉浸式认知、交互式实验操作及拓展性自主设计等,教师启发式、互动式、任务驱动式教学,全部环节采用过程评价,全面提高学生解决复杂工程问题能力。
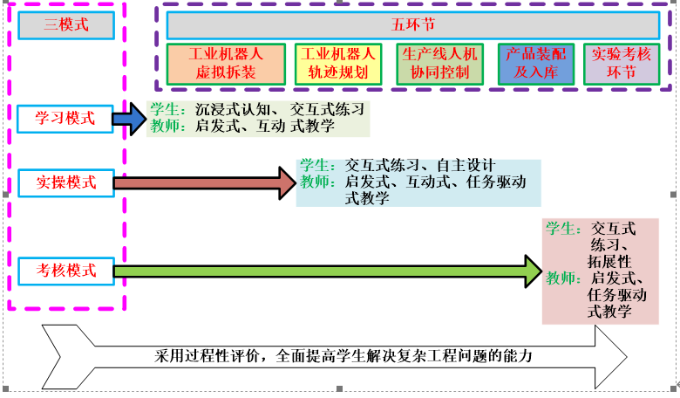
图10 各环节教学方法
(2)实验教学过程教学内容及学时分配
本实验共3学时,指导学生完成自主学习、工业机器人拆装、工业机器人轨迹规划示教评价与改进、自动化生产线人机协同控制评判与重置、装配产品入库、实验考核。实验前,学生通过实验指导书等资源自主学习相关理论与原理;课上,以问题为导向,以实验系统为依托,引导学生根据自己的认识在线进行实验操作,在实验老师引导,学生完成实验,提交实验结果,撰写实验报告,如图11所示。老师在实验期间起到引导、释疑和推动作用。
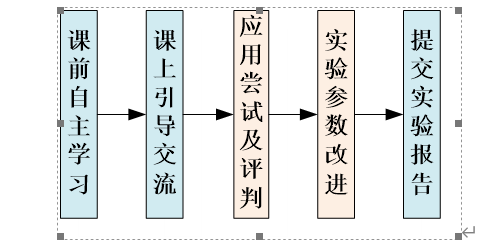
图11 实验教学过程流程图
①课前自主学习(0.15学时)
“工业机器人工具坐标系标定原理”“工业机器人示教编程原理”“工业机器人轨迹运行插补原理”“六点定位原理”“自动化生产线生产节拍协同控制原理”相关理论知识学生在实验前通过教材、慕课、微课等资源自主学习掌握。本虚拟仿真实验项目提供实验指导书,包含实验原理、实验目的、实验引导问题,实验操作和实验评价。学生在进行实验前先进行自主学习,根据实验目的和探究问题,研究实验方案和步骤,在虚拟仿真实验平台上完成实验操作。
②课上引导交流(0.15学时)
教师从具有人机协同控制机理的自动化生产线是实现智能制造基础的应用需求出发,讨论实验原理与技术问题,结合实验设计,引导学生进行讨论交流。在此基础上,各自实验方法、步骤和参数设置,如图12所示。

图12 课上讨论分析实验方法、步骤和参数设置
③应用尝试与评判(1.25学时)
按确定的实验方法、步骤和参数设置,进行线上虚拟仿真实验。为充分调动学生自主性,实验均从自动化生产线实际运行应用入手,先完成工业机器人和示教器认知和操作,再进行自主工业机器人轨迹规划和人机协同生产节拍参数设置的开放式操作,系统在线给出测试结果及其定量评价结果。
实验结果有两种可能:一是实验设计合理,能够直接给出较为正确的结果,对此老师设置一定的与应用有关的考核测试,引导学生思考更加深入的问题;二是实验结果不合理,如图13所示,图示中(a)出现工业机器人轨迹规划产生碰撞,或图示中(b)人机协同生产节拍参数设置不合理,人机协同评判未通过,由此可引导学生发现问题,思考产生问题的原因以及如何改进。

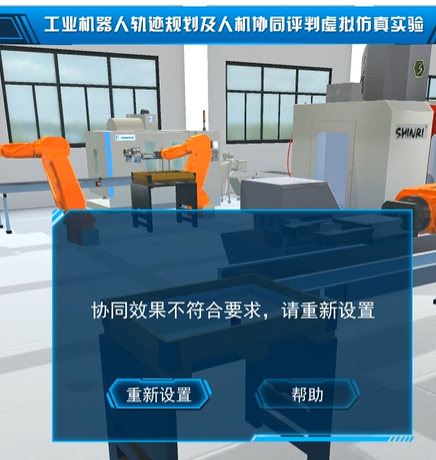
(a) (b)
图13 在线评价实验结果不合理提示
④实验参数改进(1.2学时)
针对前面实验尝试出现的问题,结合实验目的以及要探究的问题要求,进行自主设计实验。如:根据“工业机器人示教编程原理”“工业机器人轨迹运行插补原理”确定工业机器人获得抓取和放置工件的轨迹规划示教点;通过“自动化生产线生产节拍协同控制原理”评判协同参数最终达到协同要求等等。
上述③④两项实验过程是可以反复重复进行的,即学生可以随时对“工业机器人虚拟拆装”“工业机器人轨迹规划”“生产线协同控制及评判”“产品装配及入库”多次重复实验操作。
⑤提交实验报告(0.25学时)
当学生认为已经完全理解掌握了相关知识,并完成了相关实验内容后,直至完全掌握相关知识,完成“实验考核环节”,在线撰写实验报告,提交至虚拟仿真实验项目平台保存,如图14所示。

……
图14 实验报告内容及其暂存与提交
二、 实验方法
为了达到本实验教学目标,本实验项目综合了模型法、情境法、任务驱动法等多种实验方法。如图15所示,其阐明实验方法与实验目的、教学进程思路的对应关系。
.png)
图15 本项目的实验方法
(1)模型法
学生通过实验方法“模型法”完成认知工业机器人、示教器、自动化生产工艺流程,达成“掌握工业机器人工作原理、坐标系、整机组成及内部结构”和“掌握自动化生产线产品装配及入库操作”的教学目标,锻炼挖掘和发现问题能力。
本项目中的工业机器人模型来自于ER3A-C60工业机器人,搭建的自动化生产环境是以生产齿轮泵的机械加工工艺规程设计为蓝本进行了完整建模。在学生视角下,实验者不仅能够自主学习整个模型,而且在虚拟仿真模型下,身临其境进行实验过程,并对实验设备,实验现象有真实认识。本项目通过建构模型的方法模拟工业机器人示教和自动化生产线协同控制的情境,加强学生在这种模拟情境下的全面理解工业机器人工具坐标系标定原理、工业机器人示教编程原理、工业机器人插补原理、六点定位原理、自动化生产节拍协同控制原理等,为今后从事智能制造系统的研究、设计与运行管理打下基础。
(2)情境法
学生通过实验方法“情境法”,沉浸虚拟场景进行“虚拟示教”“协同控制”“产品入库”实验操作,达成“掌握工业机器人虚拟示教原理,完成示教工业机器人的工作轨迹”和“掌握自动化生产线协同控制机理、自动化生产线协同参数设置和协同控制效果评判”的教学目标,培养分析问题能力。
本项目为学生提供了全景认知工业机器人示教机理、自动化生产线人机协同控制机制。学生在虚拟的环境中,可立体、生动地沉浸其中,进行示教实验的“工业机器人轨迹规划”、协同实验的“人机协同评判”,实现学生自主设计协同控制实验;实验系统对学生的整个操作过程进行记录和评判,使教师了解学生对示教、协同控制的理解与掌握程度。
(3)任务驱动法
学生通过“任务驱动法”,培养团队意识、创新精神、科学严谨的工作态度,达成“解决复杂工程问题”能力的教学目标。
三、采用的实验方法的实施效果
本项目教师设计一些循序渐进的学生感兴趣的任务,融入到考核环节。针对示教实验、协同实验、入库实验环节分别设计评判测试,学生根据实验操作过程,完成本项目所设计的实验测试,最后完成实验思考题。任务驱动教学,充分发挥了学生的自主性,提高学生适应“新工科”背景下产教融合人才培养模式。
学生可远程登录虚拟仿真软件;学生和教师均可随时查看学习记录、成绩报表、并可以进行在线答疑。本项目的建设将推动虚拟仿真实验教学向高水平和智能化方向发展,进一步增强实验教学的服务能力。